오사카 대학의 아사다 료 교수를 중심으로 한 연구 그룹은 아동형 로봇 「Affetto(아페트)」의 기본 골격 부분을 설계·개발했습니다.유연하고 유연한 움직임이 가능하고 인간과의 교류에 적합한 로봇이 친밀한 파트너로서의 관계를 구축할 수 있는지를 밝히는 연구에 도움이 된다고 합니다.
아사다 교수들은 로봇 연구를 통해 사람의 발달에 대해 깊이 이해하고, 로봇의 지능화를 위한 원리를 찾아내는 것을 목표로 해 왔습니다.그 때문에 아이가 주위의 환경에 대해 배워, 현명해져 가는 구조에 대해서 가설을 세워, 아이형 로봇에 짜넣어 왔습니다.여기에서 중요한 것은 아이가 양육자와의 친밀한 접촉에서 많은 것을 배우는 점입니다.로봇에서 같은 일을 하기 위해서는 로봇의 동작이나 외형을 보다 자연스럽게 해야 합니다.이를 위해 연구 그룹은 80cm 정도의 크기에 유연하고 넓은 가동 범위의 관절을 통합한 기본 골격의 설계에 임했습니다.공기압을 이용하는 동력원을 짜넣는 것으로 신속함과 강도를 가지면서, 조용하고 유연한 동작을 가능하게 했습니다.그러나 이것만으로는 사람이 외부에서 힘을 가했을 때 강하게 반발하기 때문에 부상을 입을 가능성이 있습니다.이 점은 관절을 다시 설계함으로써 회피했습니다.또, 80cm 정도의 몸안에 많은 동력 기구를 짜넣어야 합니다.부위에 따라 기압식 동력과 모터를 구분하여 공간 효율적으로 배치하는 것이 가능하게 되었습니다.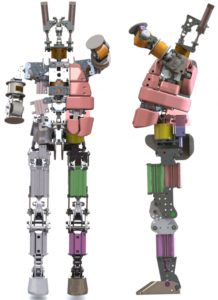 지금까지 로봇은 생산업 등에서 이용되어 온 것 외에, 인간의 파트너로서 이용하는 시도가 이루어져 왔습니다.한편, 학습의 구조를 탐구하기 위한 실험 장치로서의 이용도 늘어나고 있습니다.그 때문에 인간과 친밀하게 접촉하는 방법이 요구되고 있습니다.이번에 개발한 골격에 가세해 기능적인 피부등을 실장하는 것으로, 보다 친밀하게 접촉할 수 있는 아이의 로봇을 실현할 수 있을 것입니다.
지금까지 로봇은 생산업 등에서 이용되어 온 것 외에, 인간의 파트너로서 이용하는 시도가 이루어져 왔습니다.한편, 학습의 구조를 탐구하기 위한 실험 장치로서의 이용도 늘어나고 있습니다.그 때문에 인간과 친밀하게 접촉하는 방법이 요구되고 있습니다.이번에 개발한 골격에 가세해 기능적인 피부등을 실장하는 것으로, 보다 친밀하게 접촉할 수 있는 아이의 로봇을 실현할 수 있을 것입니다.
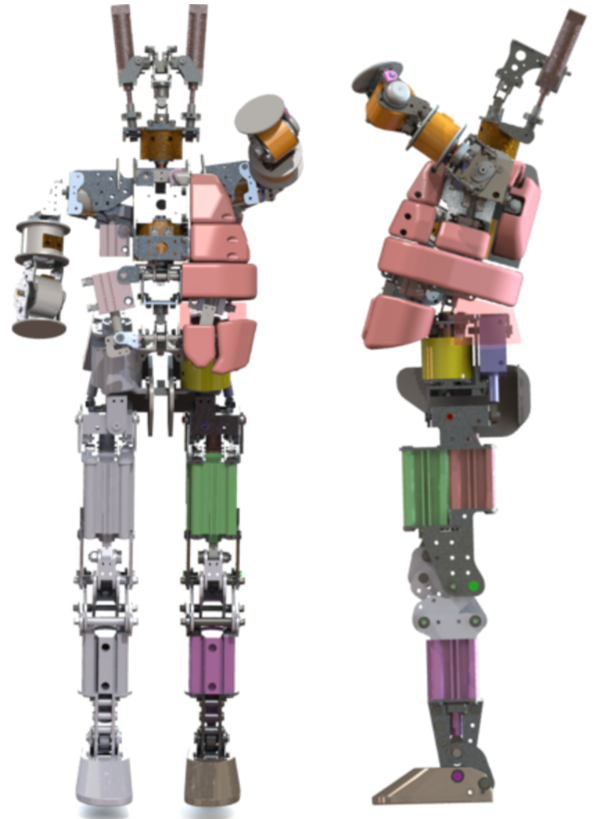
이번에 개발한 기본 골격 부분
